DroneCore Suite is a modular embedded platform for unmanned aircraft systems (UAS) that integrates an autopilot module and an NVIDIA Jetson compute module within a unified hardware and software architecture. It is designed to provide a standardised foundation for flight control, onboard computing, payload integration, and system-level development.
A key design principle of DroneCore Suite is hardware modularity. The Pilot Board provides a common integration platform for autopilot and compute modules, while extension, power, and adapter boards provide application-specific connectivity and functionality.
***
## Hardware Components
The hardware side of DroneCore Suite consists of several modular boards, each serving a specific role in the system.
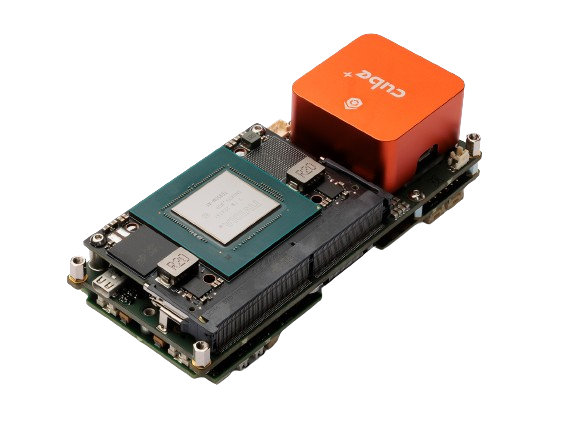
### Pilot Board
The pilot board is the central component of the DroneCore Suite. It houses the core processing and control modules and provides the main interfaces for connecting auxiliary and extension boards.
### Expansion Board
The expansion boards connects the Pilot Board to external drone components. It provides interfaces for payloads, motors, sensors, and other mission-specific hardware.
### Custom Boards
DroneCore Suite supports fully custom hardware extensions. You can design your own boards using the open-source reference designs or request custom hardware tailored to your application.
We explicitly encourage the development of custom boards when project constraints, mechanical layouts, electrical requirements, or payload interfaces differ from the reference designs.
***
## Software Components
The software side of DroneCore Suite is built around DroneCore.OS, a layered operating system designed for flexibility, reliability, and scalability.
The layered architecture allows you to interact with the system at the level that best fits your mission.
### Application Layer
The Application Layer contains mission-specific software. This includes both open-source and proprietary applications responsible for autonomy, payload control, data processing, and other high-level functions. This is the primary layer for end-user development.
### Middleware Layer
The Middleware Layer provides system services and communication interfaces. It enables reliable communication between applications, hardware components, and external systems.
### Foundation Layer
The Foundation Layer includes the core operating system components. This consists of the Linux kernel, hardware drivers, and system configuration. It provides the essential interface between software and hardware.
### Deployment Tools
Deployment tools support system replication and large-scale deployment. These tools allow you to clone system configurations, deploy updates, and manage multiple DroneCore systems efficiently. This is especially important for production fleets and scalable operations.
***
## Minimum viable configuration
The minimum viable drone configuration consists of DroneCore.Suite assembled with a flight controller unit and Nvidia Jetson, 4 motors, a power supply, and a receiver for remote control.
The receiver is not mandatory if the drone is controlled via Wi-Fi/Bluetooth or is completely autonomous. However, it is recommended to test the flight controller regulators' settings with manual control through the radio first.
***
## Technical parameters (Default configuration)

.png?alt=media&token=b41153aa-f8f9-4b2e-b853-166b65e12234)
{kind=link}
.png?alt=media){kind=link}
.png?alt=media){kind=link}