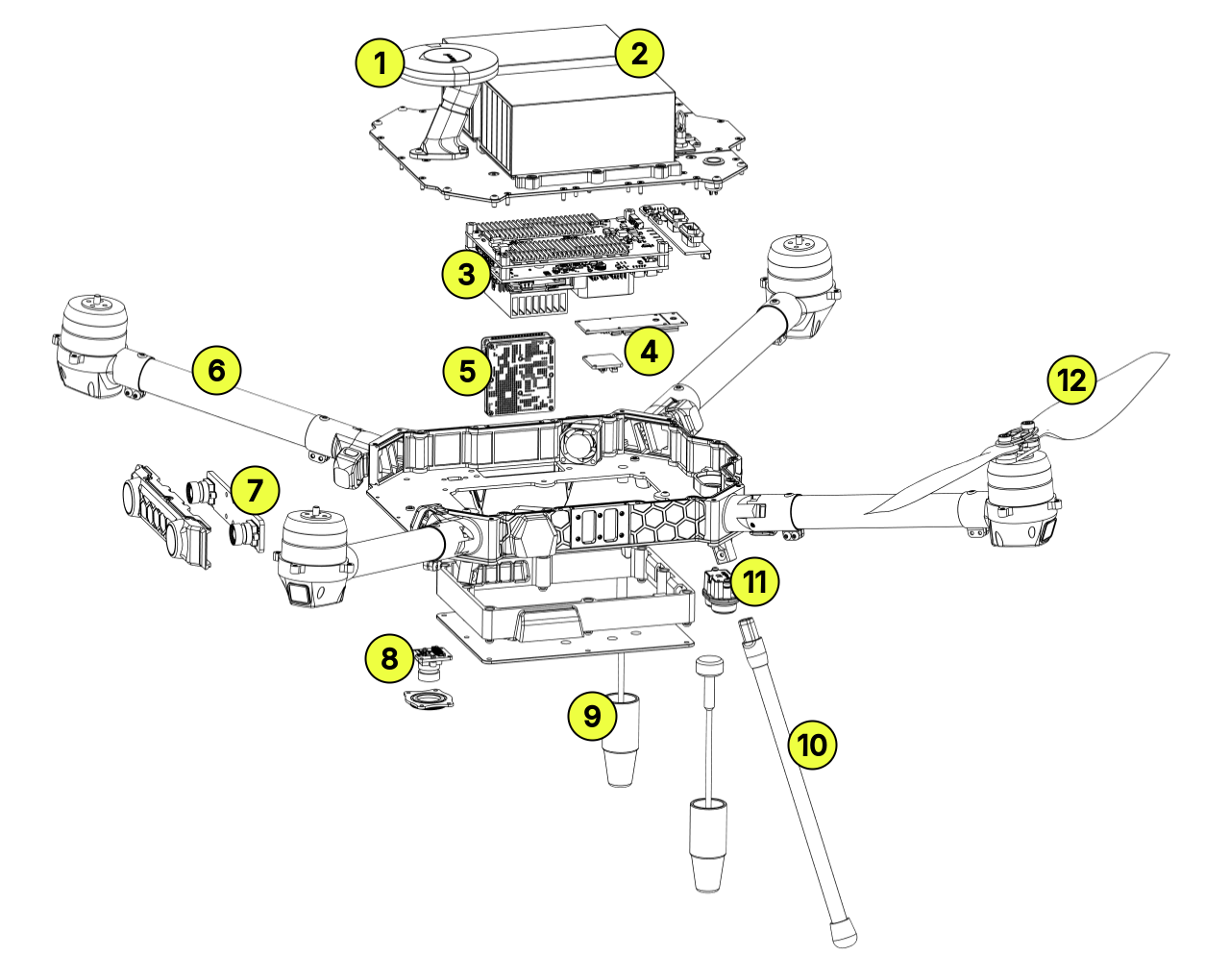
Stribog UAS scheme
Stribog UAS scheme
| Forward | Stereo camera 95mm baseline FOV: horizontal 92.76°, vertical 66.89°, 1280x800px |
| Downward | Mono camera; FOV: horizontal 92.76°, vertical 66.89°, 1280x800px |
| Global Navigation Satellite System | GPS + Galileo + BeiDou |
| Lidar | 0.2 - 50m range |