# Hadron 640R Adapter
{% columns %}
{% column %}
 {% endcolumn %}
{% column %}
{% endcolumn %}
{% column %}
.png?alt=media) {% endcolumn %}
{% endcolumns %}
{% hint style="info" %}
There are 2 versions of the connection adapter:
* Standard FPC cable output version (left)
* New microCoax cable output version - compatible with new DCS2 expansion boards (right)
{% endhint %}
**Skip unnecessary integration: Run the most popular payloads instantly.**
DroneCore Suite x Hadron Adapter is a combination of hardware and software for seamless transmission of video stream from the FLIR Hadron camera into the Jetson running on the DroneCore Suite.
**Box content**
* 1x Hadron Adapter for DCS including a software driver.
* 1x Cam – FPC cable (length 10 cm / 20 cm / 25 cm)
**3D model - FPC version**
{% file src="" %}
***
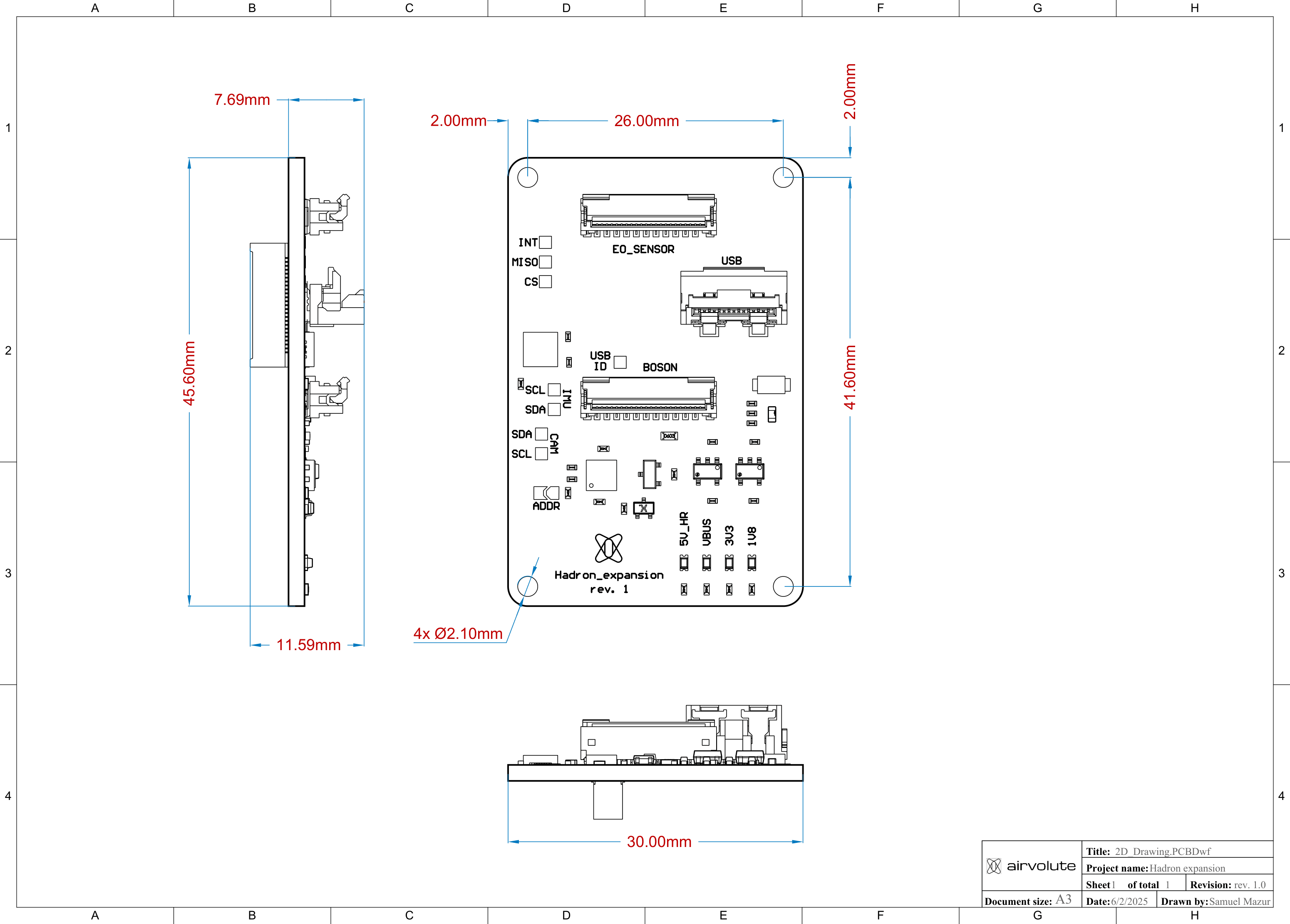
## Dimensions
{% tabs %}
{% tab title="FPC" %}
{% endcolumn %}
{% endcolumns %}
{% hint style="info" %}
There are 2 versions of the connection adapter:
* Standard FPC cable output version (left)
* New microCoax cable output version - compatible with new DCS2 expansion boards (right)
{% endhint %}
**Skip unnecessary integration: Run the most popular payloads instantly.**
DroneCore Suite x Hadron Adapter is a combination of hardware and software for seamless transmission of video stream from the FLIR Hadron camera into the Jetson running on the DroneCore Suite.
**Box content**
* 1x Hadron Adapter for DCS including a software driver.
* 1x Cam – FPC cable (length 10 cm / 20 cm / 25 cm)
**3D model - FPC version**
{% file src="" %}
***
## Dimensions
{% tabs %}
{% tab title="FPC" %}
 {% endtab %}
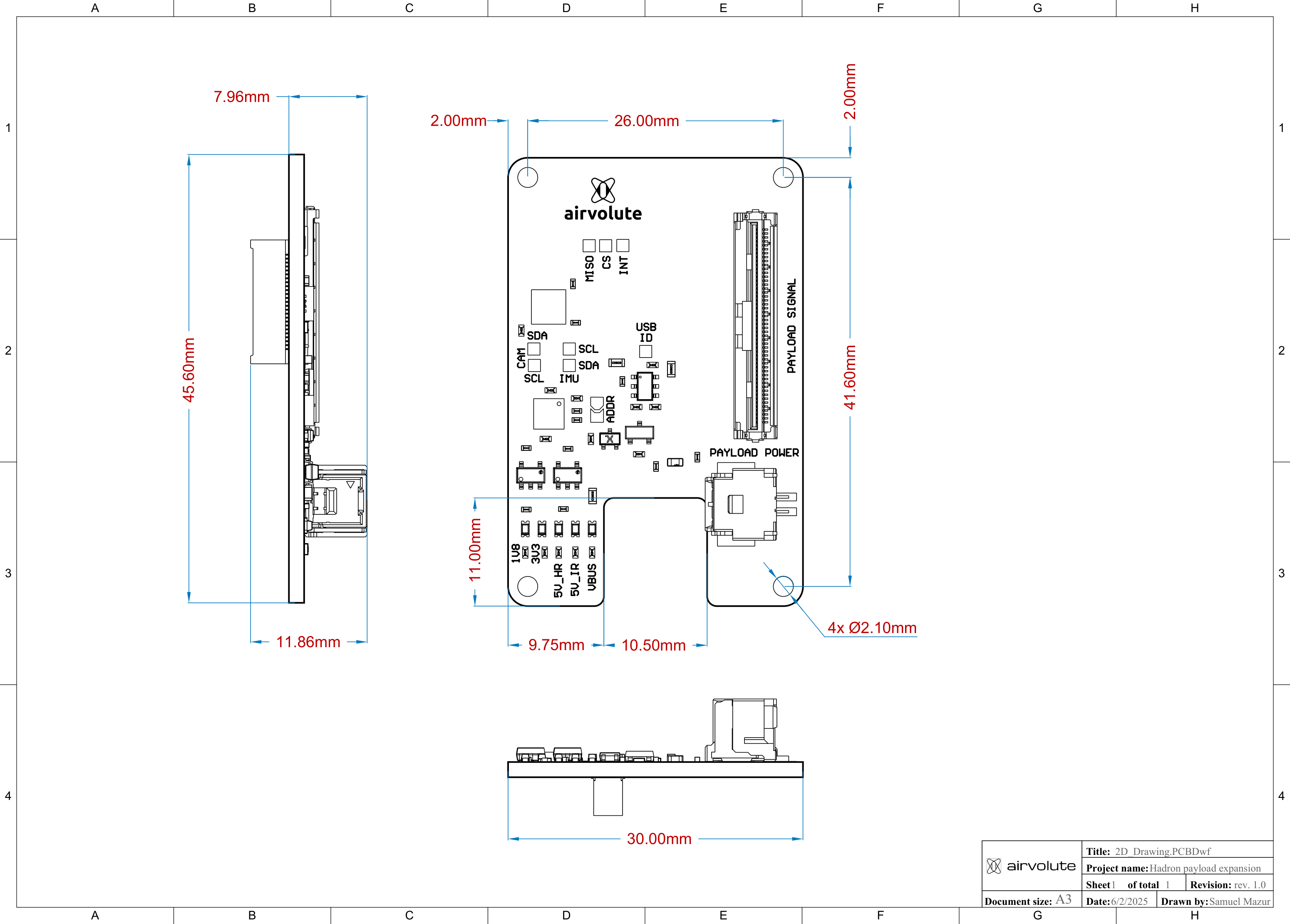
{% tab title="uCoax" %}
{% endtab %}
{% tab title="uCoax" %}
 {% endtab %}
{% endtabs %}
{% file src="" %}
{% file src="" %}
***
## Power supply
{% tabs %}
{% tab title="FPC" %}
{% endtab %}
{% endtabs %}
{% file src="" %}
{% file src="" %}
***
## Power supply
{% tabs %}
{% tab title="FPC" %}
 {% endtab %}
{% tab title="uCoax" %}
{% endtab %}
{% tab title="uCoax" %}
 {% endtab %}
{% endtabs %}
***
## Connections and pinouts
{% tabs %}
{% tab title="FPC" %}
{% endtab %}
{% endtabs %}
***
## Connections and pinouts
{% tabs %}
{% tab title="FPC" %}

EO SENSOR
* 501951-2210 connector type
* I2C and PWND are 3V3 logic
| pin | function |
| --- | ----------- |
| 1 | NC |
| 2 | I2C\_SDA |
| 3 | I2C\_SCL |
| 4 | GND |
| 5 | MCLK |
| 6 | PWDN |
| 7 | GND |
| 8 | CSI\_D3\_P |
| 9 | CSI\_D3\_N |
| 10 | GND |
| 11 | CSI\_D2\_P |
| 12 | CSI\_D2\_P |
| 13 | GND |
| 14 | CSI\_CLK\_P |
| 15 | CSI\_CLK\_N |
| 16 | GND |
| 17 | CSI\_D1\_P |
| 18 | CSI\_D1\_N |
| 19 | GND |
| 20 | CSI\_D0\_P |
| 21 | CSI\_D0\_N |
| 22 | GND |
BOSON
{% hint style="warning" %}
Pins marked with \* are NC in the default configuration
{% endhint %}
| pin | function |
| --- | ----------- |
| 1 | NC |
| 2 | I2C\_SDA\* |
| 3 | I2C\_SCL\* |
| 4 | GND |
| 5 | MCLK\* |
| 6 | PWDN\* |
| 7 | GND |
| 8 | NC |
| 9 | NC |
| 10 | GND |
| 11 | NC |
| 12 | NC |
| 13 | GND |
| 14 | CSI\_CLK\_P |
| 15 | CSI\_CLK\_N |
| 16 | GND |
| 17 | CSI\_D1\_P |
| 18 | CSI\_D1\_N |
| 19 | GND |
| 20 | CSI\_D0\_P |
| 21 | CSI\_D0\_N |
| 22 | GND |
USB
* USB 3.2 standard
* compatible with Molex 538-15021 cable series
* voltage levels according to USB standards
* RX/TX orientation in respect with camera side
{% hint style="warning" %}
Pins marked with \* are NC in the default configuration
{% endhint %}
{% hint style="danger" %}
This connector can be connected/disconnected only when the system is powered off!
{% endhint %}
| pin | function |
| --- | -------- |
| 1 | 5V |
| 2 | 5V |
| 3 | 5V |
| 4 | 5V |
| 5 | GND |
| 6 | GND |
| 7 | D\_P |
| 8 | D\_N |
| 9 | GND |
| 10 | RX\_P\* |
| 11 | RX\_N\* |
| 12 | GND |
| 13 | TX\_P\* |
| 14 | TX\_N\* |
| 15 | GND |
ADDR
Solder bridge to change GPIO I2C address:
* SB open = 0x21
* SB closed = 0x20
{% endtab %}
{% tab title="uCoax" %}

PAYLOAD SIGNALS
* Matching connector Hirose DF36-50P-0.4SD
* I2C and PWND are 3V3 logic
* RX/TX orientation in respect with camera side
{% hint style="warning" %}
Pins marked with \* are NC in the default configuration
{% endhint %}
{% hint style="danger" %}
This connector can be connected/unconnected only when the system is powered off!
{% endhint %}
| pin | function |
| ----- | ------------ |
| 1-14 | NC |
| 15 | CSI\_D3\_P |
| 16 | CSI\_D3\_N |
| 17 | CSI\_D2\_P |
| 18 | CSI\_D2\_N |
| 19 | I2C\_SDA |
| 20 | I2C\_SCL |
| 21 | MCLK |
| 22 | PWDN |
| 23 | CSI\_CLK\_P |
| 24 | CSI\_CLK\_N |
| 25 | CSI\_D1\_P |
| 26 | CSI\_D1\_N |
| 27 | CSI\_D0\_P |
| 28 | CSI\_D0\_N |
| 29 | USB\_PWRCTL |
| 30 | USB\_OC |
| 31 | USB\_D\_P |
| 32 | USB\_D\_N |
| 33 | USB\_RX\_P\* |
| 34 | USB\_RX\_N\* |
| 35 | USB\_TX\_P\* |
| 36 | USB\_TX\_N\* |
| 37-50 | NC |
PAYLOAD POWER
Matching connector Molex 502578-020x
| pin | function |
| --- | -------- |
| 1 | GND |
| 2 | 5V |
ADDR
Solder bridge to change GPIO I2C address:
* SB open = 0x21
* SB closed = 0x20
{% endtab %}
{% endtabs %}
***
## Software driver
* Currently supports 1920x1080 and 3840x2160 resolutions with 30FPS
* Exposure and gain can be changed "online" (utilising NVIDIA Jeston ISP autoexposure functionality)
* Resolution and framerate change requires reset of the camera stream
* v4l2 compliant
{% hint style="warning" %}
Driver is not a part of the standard DroneCore OS and is subject to license terms. For more information, please contact
{% endhint %}